


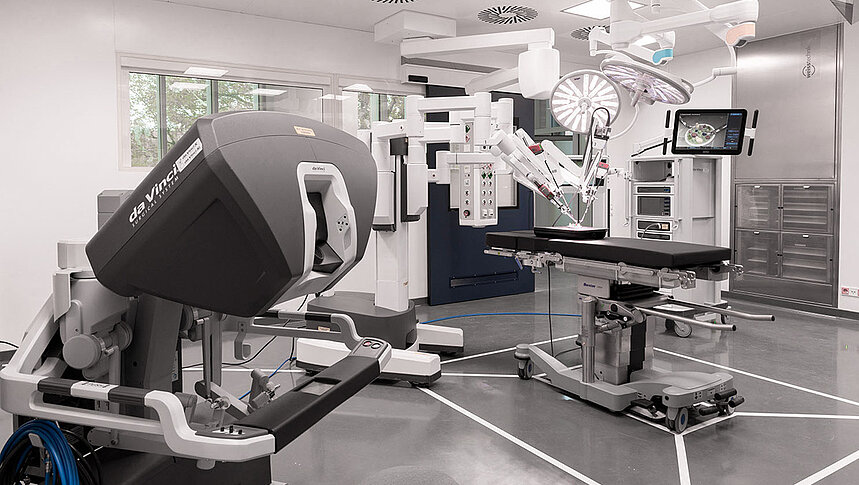
Aufbau eines roboterassistierten Operationssystems
Ein roboterassistiertes Operationssystem besteht aus drei wesentlichen Bausteinen: der Steuerkonsole, dem Videosystem und dem oder den Stativen.
Die Steuerkonsole
An der Steuerkonsole im Operationssaal sitzt der Operateur und blickt durch das in die Konsole integrierte stereoskopische Sichtfenster. Die rechte und linke Hand des Operateurs befinden sich in je einer frei beweglichen Griffeinrichtung. Diese wandeln die Bewegung der Finger und Handgelenke in elektronische Steuersignale um. Die Steuersignale werden an das patientenseitige Stativ weitergeleitet und setzen die Bewegungen der Hände in identische Bewegungen der Instrumente im Operationsfeld um.
In den roboterassistierten Operationssystemen findet modernste Telemanipulator-Technologie Anwendung. So wird die Handbewegung des Arztes verfeinert und den feinen Strukturen im Körper angepasst. Der Operateur arbeitet mit einer absolut ruhigen Hand, die in dieser Form weder bei der klassisch chirurgischen Operation noch bei der klassischen Laparoskopie möglich wäre.
Das hochauflösende Videosystem
Die außerordentlich guten Sichtverhältnisse bei einer Operation mit dem Roboterystem beruhen auf seiner hochauflösenden 3D-Sicht. Am besten lässt sich der Blick durch das Sichtfenster mit dem Blick durch ein Fernglas vergleichen. In der Kamera sind zwei Optiken in einem Schaft zusammengefasst. Für jede Optik steht eine separate Kamera zur Verfügung. Das rechte und linke Bild werden auf zwei Monitore übertragen, synchronisiert und in das Sichtfenster übertragen. Durch die Verschmelzung von rechtem und linkem Bild wird ein dreidimensionaler Blick mit vollständiger ordentlicher Tiefe geschaffen. Die Kameras arbeiten darüber hinaus mit zehnfacher Vergrößerung, so dass auch sehr feine Strukturen sicher dargestellt werden können. Das ermöglicht optimale Sichtverhältnisse – die Grundvoraussetzung für präzise Mikrochirurgie.
Das patientenseitige Stativ
Das Stativ steht unmittelbar am Patienten. Es trägt drei Instrumentenarme und mittig den Kameraarm. An diesen Armen werden die Instrumente mittels Adaptern angedockt, ebenso die Kamera. Über Robotersystem-spezifische Trokare werden Instrumente und Kamera in den Patienten eingeführt. Das Stativ während der Operation setzt die vom Operateur an der Steuerkonsole durchgeführten Bewegungen der Instrumente um. Die Instrumente verfügen über multiple Gelenke und ermöglichen sieben Freiheitsgrade, die in der Beweglichkeit exakt den Händen und Handgelenken des Operateurs entsprechen. Das ist besonders bei der Präparation und Rekonstruktion feinster anatomischer Strukturen ein wesentlicher Vorteil. Denn so bewegen sich die Instrumente exakt so, wie es der Operateur vorsieht.


